任务管理器 More...
#include <task_manager.hpp>

Classes | |
| struct | InterruptWork |
| 中断线程处理结构体 More... | |
Public Member Functions | |
| auto | InitCurrentCore () -> void |
| 初始化 per cpu 的调度数据,创建 idle 线程 | |
| auto | AddTask (etl::unique_ptr< TaskControlBlock > task) -> void |
| 添加任务(接管所有权) | |
| auto | Schedule () -> void |
| 调度函数 选择下一个任务并切换上下文 | |
| auto | GetCurrentTask () const -> TaskControlBlock * |
| 获取当前任务 | |
| auto | TickUpdate () -> void |
| 更新系统 tick | |
| auto | Sleep (uint64_t ms) -> void |
| 线程睡眠 | |
| auto | Exit (int exit_code=0) -> void |
| 退出当前线程 | |
| auto | Block (ResourceId resource_id) -> void |
| 阻塞当前任务 | |
| auto | Wakeup (ResourceId resource_id) -> void |
| 唤醒等待指定资源的所有任务 | |
| auto | Clone (uint64_t flags, void *user_stack, int *parent_tid, int *child_tid, void *tls, cpu_io::TrapContext &parent_context) -> Expected< Pid > |
| 克隆当前任务 (fork/clone 系统调用) | |
| auto | Wait (Pid pid, int *status, bool no_hang=false, bool untraced=false) -> Expected< Pid > |
| 等待子进程退出 | |
| auto | FindTask (Pid pid) -> TaskControlBlock * |
| 按 PID 查找任务 | |
构造/析构函数 | |
| TaskManager ()=default | |
| TaskManager (const TaskManager &)=delete | |
| TaskManager (TaskManager &&)=delete | |
| auto | operator= (const TaskManager &) -> TaskManager &=delete |
| auto | operator= (TaskManager &&) -> TaskManager &=delete |
| ~TaskManager () | |
Private Types | |
| using | InterruptWorkQueue = mpmc_queue::MPMCQueue< InterruptWork, kInterruptQueueCapacity > |
| 中断工作队列 | |
Private Member Functions | |
| auto | AllocatePid () -> size_t |
| 分配新的 PID | |
| auto | Balance () -> void |
| 负载均衡 (空闲 core 窃取任务) | |
| auto | GetCurrentCpuSched () -> CpuSchedData & |
| 获取当前核心的调度数据 | |
| auto | GetThreadGroup (Pid tgid) -> etl::vector< TaskControlBlock *, kernel::config::kMaxReadyTasks > |
| 获取线程组的所有线程 | |
| auto | SignalThreadGroup (Pid tgid, int signal) -> void |
| 向线程组中的所有线程发送信号 | |
| auto | ReapTask (TaskControlBlock *task) -> void |
| 回收僵尸进程资源 | |
| auto | ReparentChildren (TaskControlBlock *parent) -> void |
| 将孤儿进程过继给 init 进程 | |
Private Attributes | |
| std::array< CpuSchedData, SIMPLEKERNEL_MAX_CORE_COUNT > | cpu_schedulers_ {} |
| 每个核心的调度数据 | |
| SpinLock | task_table_lock_ {"task_table_lock"} |
| 全局任务表 (PID -> TCB 映射) | |
| etl::unordered_map< Pid, etl::unique_ptr< TaskControlBlock >, kernel::config::kMaxTasks, kernel::config::kMaxTasksBuckets > | task_table_ |
| SpinLock | interrupt_threads_lock_ {"interrupt_threads_lock"} |
| 中断线程相关数据保护锁 | |
| etl::unordered_map< uint64_t, TaskControlBlock *, kernel::config::kMaxInterruptThreads, kernel::config::kMaxInterruptThreadsBuckets > | interrupt_threads_ |
| 中断号 -> 中断线程映射 | |
| etl::unordered_map< uint64_t, InterruptWorkQueue *, kernel::config::kMaxInterruptThreads, kernel::config::kMaxInterruptThreadsBuckets > | interrupt_work_queues_ |
| 中断号 -> 工作队列映射 | |
| std::atomic< size_t > | pid_allocator_ {1} |
| PID 分配器 | |
Static Private Attributes | |
| static constexpr size_t | kInterruptQueueCapacity = 256 |
| 中断工作队列容量 | |
Detailed Description
Member Typedef Documentation
◆ InterruptWorkQueue
|
private |
中断工作队列
Definition at line 220 of file task_manager.hpp.
Constructor & Destructor Documentation
◆ TaskManager() [1/3]
|
default |
◆ TaskManager() [2/3]
|
delete |
◆ TaskManager() [3/3]
|
delete |
◆ ~TaskManager()
| TaskManager::~TaskManager | ( | ) |
Definition at line 262 of file task_manager.cpp.
Member Function Documentation
◆ AddTask()
| auto TaskManager::AddTask | ( | etl::unique_ptr< TaskControlBlock > | task | ) | -> void |
添加任务(接管所有权)
根据任务的调度策略,将其添加到对应的调度器中。
- Parameters
-
task 任务控制块,所有权转移给 TaskManager
- Precondition
- task 非空,状态为 kUnInit
Definition at line 94 of file task_manager.cpp.

◆ AllocatePid()
|
private |
分配新的 PID
- Returns
- size_t 新的 PID
- Note
- 当前 PID 分配器为简单的原子自增,存在以下限制:
- 不支持 PID 回收与重用(已退出的任务的 PID 不会被回收)
- 不检测溢出(size_t 耗尽后回绕为 0,可能与现有 PID 冲突)
- 不保证全局唯一性(依赖 size_t 足够大 + 系统生命周期内不会耗尽) 对于教学内核而言,size_t 的范围(2^64)在实际使用中不会溢出。 生产级实现应使用位图或 ID 分配器(如 Linux 的 IDR/IDA)。
Definition at line 165 of file task_manager.cpp.
◆ Balance()
|
private |
负载均衡 (空闲 core 窃取任务)
Definition at line 181 of file task_manager.cpp.
◆ Block()
| auto TaskManager::Block | ( | ResourceId | resource_id | ) | -> void |
阻塞当前任务
- Parameters
-
resource_id 等待的资源 ID
- Copyright
- Copyright The SimpleKernel Contributors
Definition at line 12 of file block.cpp.
◆ Clone()
| auto TaskManager::Clone | ( | uint64_t | flags, |
| void * | user_stack, | ||
| int * | parent_tid, | ||
| int * | child_tid, | ||
| void * | tls, | ||
| cpu_io::TrapContext & | parent_context | ||
| ) | -> Expected<Pid> |
克隆当前任务 (fork/clone 系统调用)
- Parameters
-
flags 克隆标志位 - kCloneVm: 共享地址空间
- kCloneThread: 共享线程组
- kCloneFiles: 共享文件描述符表
- kCloneSighand: 共享信号处理器
- 0: 完全复制 (fork)
user_stack 用户栈指针 (nullptr 表示复制父进程栈) parent_tid 父进程 TID 存储地址 child_tid 子进程 TID 存储地址 tls 线程局部存储指针 parent_context 父进程的 trap 上下文 (用于复制寄存器)
- Returns
- Expected<Pid> 父进程返回子进程 PID,子进程返回 0,失败返回错误
- Copyright
- Copyright The SimpleKernel Contributors
- Todo:
- 当前未实现文件系统,此标志暂时仅记录
- Todo:
- 当前未实现信号机制,此标志暂时仅记录
- Todo:
- 当前未实现文件系统,此标志暂时仅记录
Definition at line 13 of file clone.cpp.
◆ Exit()
| auto TaskManager::Exit | ( | int | exit_code = 0 | ) | -> void |
退出当前线程
- Parameters
-
exit_code 退出码
- Copyright
- Copyright The SimpleKernel Contributors
- Todo:
- 通知父进程 (发送 SIGCHLD)
Definition at line 12 of file exit.cpp.
◆ FindTask()
| auto TaskManager::FindTask | ( | Pid | pid | ) | -> TaskControlBlock* |
按 PID 查找任务
- Parameters
-
pid 进程 ID
- Returns
- TaskControlBlock* 找到的任务,未找到返回 nullptr
Definition at line 175 of file task_manager.cpp.
◆ GetCurrentCpuSched()
|
inlineprivate |
获取当前核心的调度数据
- Returns
- CpuSchedData& 当前核心的调度数据引用
Definition at line 264 of file task_manager.hpp.

◆ GetCurrentTask()
|
inline |
获取当前任务
- Returns
- TaskControlBlock* 当前正在运行的任务
Definition at line 116 of file task_manager.hpp.

◆ GetThreadGroup()
|
private |
获取线程组的所有线程
- Parameters
-
tgid 线程组 ID
- Returns
- etl::vector<TaskControlBlock*, kernel::config::kMaxReadyTasks> 线程组中的所有线程
Definition at line 234 of file task_manager.cpp.
◆ InitCurrentCore()
| auto TaskManager::InitCurrentCore | ( | ) | -> void |
初始化 per cpu 的调度数据,创建 idle 线程
Definition at line 39 of file task_manager.cpp.

◆ operator=() [1/2]
|
delete |
◆ operator=() [2/2]
|
delete |
◆ ReapTask()
|
private |
回收僵尸进程资源
- Parameters
-
task 要回收的任务 (必须处于 kZombie 状态)
- Note
- 释放内核栈、页表、TCB,回收 PID
Definition at line 186 of file task_manager.cpp.
◆ ReparentChildren()
|
private |
将孤儿进程过继给 init 进程
- Parameters
-
parent 退出的父进程
- Note
- 在父进程退出时调用,防止子进程变成僵尸无人回收
- Todo:
- 当前的 pid 是自增的,需要考虑多核情况
- Todo:
- 实现向 init 进程发送 SIGCHLD 信号
Definition at line 210 of file task_manager.cpp.

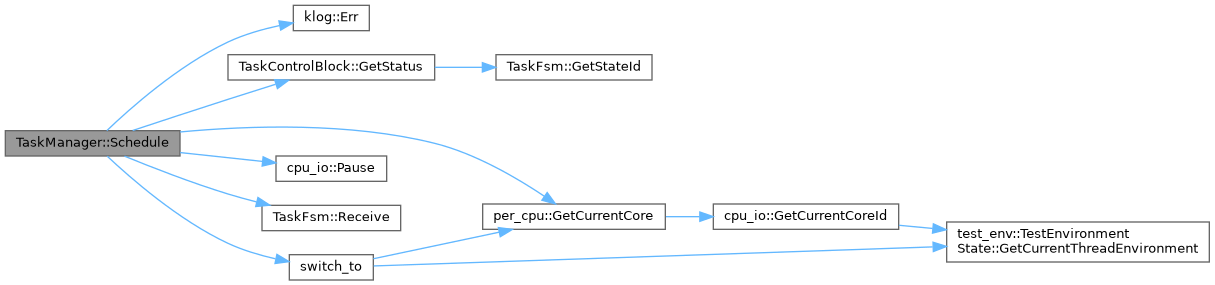
◆ Schedule()
| auto TaskManager::Schedule | ( | ) | -> void |
调度函数 选择下一个任务并切换上下文
- Note
- 被调用意味着需要调度决策,可能是 时间片耗尽(TickUpdate 检测到需要抢占) 主动让出 CPU (yield) 任务阻塞、睡眠或退出
- Copyright
- Copyright The SimpleKernel Contributors
Definition at line 26 of file schedule.cpp.
◆ SignalThreadGroup()
|
private |
向线程组中的所有线程发送信号
- Parameters
-
tgid 线程组 ID signal 信号编号
- Note
- 暂未实现信号机制,预留接口
- Todo:
- 实现信号机制后,向线程组中的所有线程发送信号
Definition at line 250 of file task_manager.cpp.

◆ Sleep()
| auto TaskManager::Sleep | ( | uint64_t | ms | ) | -> void |
线程睡眠
- Parameters
-
ms 睡眠毫秒数
Definition at line 14 of file sleep.cpp.

◆ TickUpdate()
| auto TaskManager::TickUpdate | ( | ) | -> void |
更新系统 tick
- Copyright
- Copyright The SimpleKernel Contributors
Definition at line 9 of file tick_update.cpp.
◆ Wait()
| auto TaskManager::Wait | ( | Pid | pid, |
| int * | status, | ||
| bool | no_hang = false, |
||
| bool | untraced = false |
||
| ) | -> Expected<Pid> |
等待子进程退出
- Parameters
-
pid 子进程 PID (-1 表示任意子进程,0 表示同组,>0 表示指定进程) status 退出状态存储位置 (可为 nullptr) no_hang 非阻塞等待,立即返回 (类似 WNOHANG) untraced 报告已停止的子进程 (类似 WUNTRACED)
- Returns
- Expected<Pid> 成功返回子进程 PID,无子进程或被中断返回错误
- Copyright
- Copyright The SimpleKernel Contributors
Definition at line 13 of file wait.cpp.

◆ Wakeup()
| auto TaskManager::Wakeup | ( | ResourceId | resource_id | ) | -> void |
唤醒等待指定资源的所有任务
- Parameters
-
resource_id 资源 ID
- Note
- 会唤醒所有阻塞在此资源上的任务
- Copyright
- Copyright The SimpleKernel Contributors
Definition at line 12 of file wakeup.cpp.

Member Data Documentation
◆ cpu_schedulers_
|
private |
◆ interrupt_threads_
|
private |
中断号 -> 中断线程映射
Definition at line 239 of file task_manager.hpp.
◆ interrupt_threads_lock_
|
private |
◆ interrupt_work_queues_
|
private |
中断号 -> 工作队列映射
Definition at line 244 of file task_manager.hpp.
◆ kInterruptQueueCapacity
|
staticconstexprprivate |
中断工作队列容量
Definition at line 200 of file task_manager.hpp.
◆ pid_allocator_
|
private |
◆ task_table_
|
private |
Definition at line 231 of file task_manager.hpp.
◆ task_table_lock_
|
private |
The documentation for this class was generated from the following files:
- /workspaces/SimpleKernel/src/task/include/task_manager.hpp
- /workspaces/SimpleKernel/src/task/block.cpp
- /workspaces/SimpleKernel/src/task/clone.cpp
- /workspaces/SimpleKernel/src/task/exit.cpp
- /workspaces/SimpleKernel/src/task/schedule.cpp
- /workspaces/SimpleKernel/src/task/sleep.cpp
- /workspaces/SimpleKernel/src/task/task_manager.cpp
- /workspaces/SimpleKernel/src/task/tick_update.cpp
- /workspaces/SimpleKernel/src/task/wait.cpp
- /workspaces/SimpleKernel/src/task/wakeup.cpp